Processing images from the Lucy 360 degree video cameraWritten by Paul BourkeApril 2009
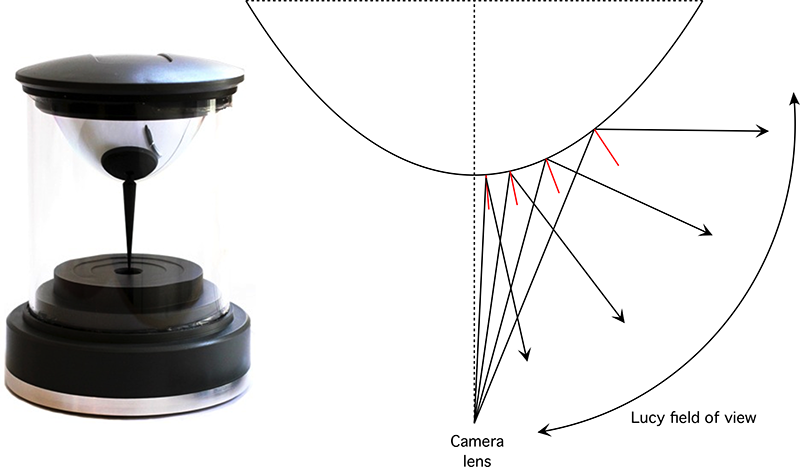
The Lucy camera from Kogeto is one of a number of cameras that record 360 video by placing a radially symmetric parabolic mirror in front of a single video camera lens, see figure 1. The following is an attempt to create an in-house means of processing the footage from this camera but also to make it general enough to handle footage from other designs including in-house cameras based upon higher resolution cameras. There would also seem to be some deficiencies in the software distributed with the Lucy, in particular, being able to correct for various aberration and provide interactive playback on other operating systems and packages.
The image recorded by the video camera has a geometry as shown in figure 2. It is distinguished by a central dead zone hiding the camera lens mount, and an outer circle which is the maximum vertical angle (latitude) captured. 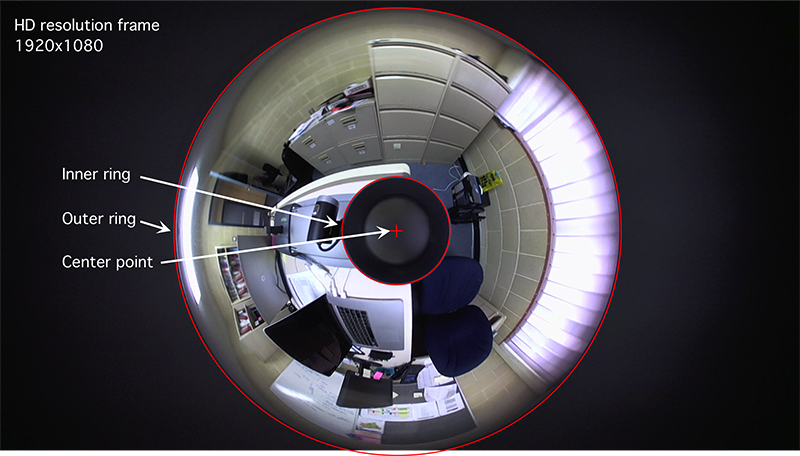
The native image from a camera such as this is not a particularly standard type of projection. More standard are cylindrical and spherical (equirectangular) panoramas. There is of course a one-to-one mapping between the image as filmed and these panoramas. In particular, panoramas are a more natural image projection for immersive displays in which these 360 videos may be presented, for example the iDome or HMDs. The mapping between the Lucy frames and a spherical panorama is shown below.
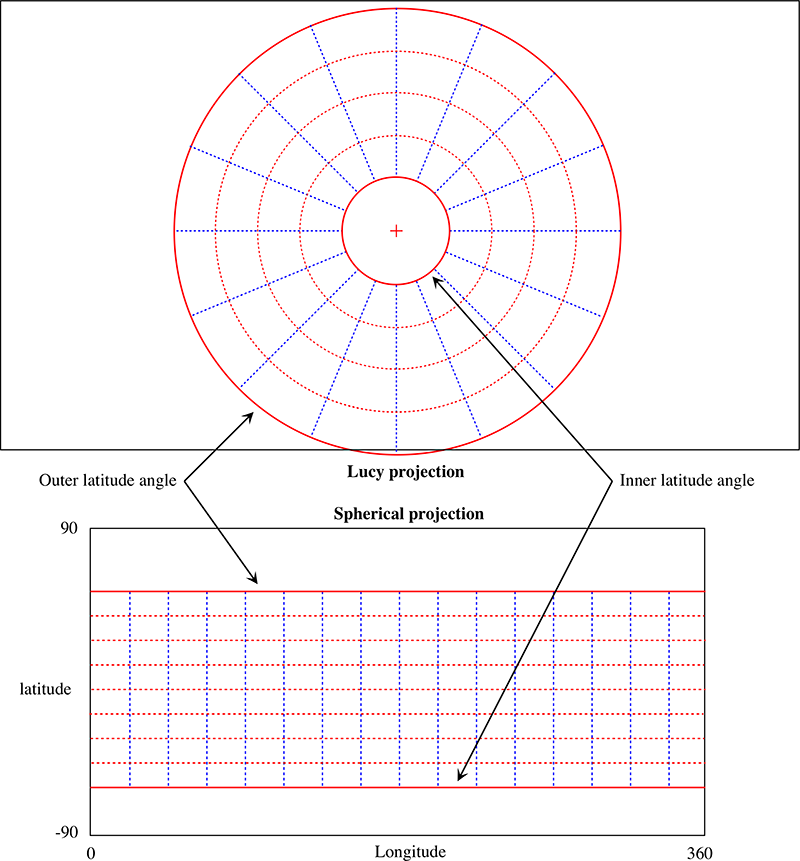
There are a number of parameters any image warping needs to consider when doing the transformation between Lucy image space and spherical panorama space.
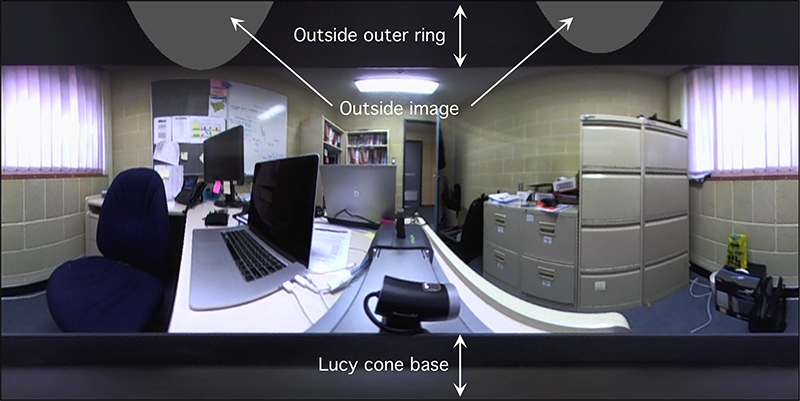
A command line utility has been written to test the mappings described above. Equally a warping mesh could be developed for software such as Warpplayer, the Quartz Composer pbmesh, an OpenGL shader or any other image distorting API. Of particular importance in an off-line converter is treating antialiasing appropriately, in the test software here supersampling antialiasing is used. lucy2sph [options] tgafile Options: -r n n inner and outer radius, default: 130 532 -l n n inner and outer latitude, default: -60 60 -c x y center of cone, default: 952 553 -a n set antialias level, default: 2 -w n width of the spherical image, default: 1024 -v apply vertical flip, default: off -h apply horizontal flip, default: offResolution The advantage of single camera based 360 degree video recorder over multiple camera solutions is that there are no blend zones with the inevitable errors. It is fundamentally not possible to combine images from multiple cameras so as to avoid stitching/blending issues for all depths. The disadvantage of single camera solutions is the lack of image resolution, and fidelity if a standard Bayer style single panel video camera is being used along with lossy compression. The question of resolution is complicated by the fact that it depends on the region of the image involved. Objects closer to the central region of the camera image, corresponding to low/negative values of latitude are much less resolved than objects towards the outer region of the camera image, corresponding to high/positive angle of latitude. For example, for an inner radius of 130 and an outer radius of 532 pixels (from an actual Lucy camera), at those respective values of latitude there are 2 pi r samples captured. This linear function suggest almost 4 times the effective resolution at the outer radius latitude than the inner radius latitude. At the equator this equates to a panorama of about 2000 pixels, significantly less than any of the multiple camera rigs which aim for between 5000 and 8000 pixel panoramas and generally support a more regular distribution of resolution with latitude. |