In the following the main 3D scanning and reconstruction technologies are outlined.
Please note that
comments are of a general nature, there are variants of each of these and some specialist
versions may push the boundaries referred to below.
- 3D reconstruction.
Often called photogrammetry (but not a good term), prefer "3D reconstruction from
photographs". In essence one takes a large number of photographs, each from a different position.
Software finds feature points, Bundler algorithm derives camera positions, then a meshing and
texturing is computed.
Generally requires surfaces with colour/texture detail. This often makes it unsuitable for modern
architecture, large plain surfaces. So for example, ideal for this type of interior space

but not for a plain walled room. Also problematic are reflective surfaces. For interior spaces it is
generally unsuitable for spaces with large numbers of occluding objects, for example, furniture
scattered around a room.
Example in a forensic application can be found below, graves on
Beacon Island.
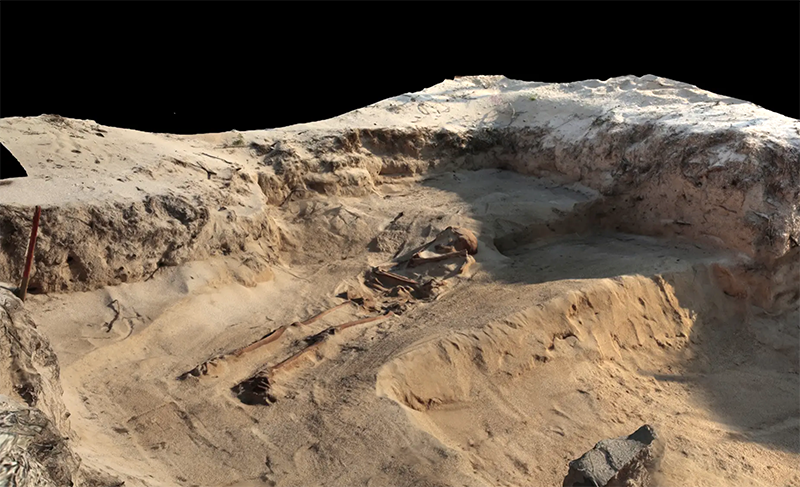
this was conducted in the field, within 10 minutes per capture, performed at different stages
during the excavation. The process can be sped up by using camera arrays, but they are more
cumbersome, otherwise nothing required other than off-the-shelf camera equipment.
- Laser scanning.
This is a specific type of return of flight technology using a laser. Unlike some other return of flight
systems this one is purely a scanning technique, as opposed to area depth sense, see later. Most
suited to spaces rather than objects (at least for full models), the complexity of the space dictates
how many laser positions might be required to minimize shadow zones. The usual complaints with
laser scanning are the overwhelming number of points generated and the often low quality of the
colour information. The colour issue is improving as the applications now include capture for VR
rather than the traditional applications in surveying.
There are some further comments
here on the relative merits for an archaeological site

- Structured light.
The object/space is illuminated with a known light pattern, the way that pattern is affected by the
geometry of the object can infer 3D structure. Mostly applied to smallish (<1m) objects as it
requires the object to be illuminated (possibly in sections) and a corresponding camera capture.
There are many commercially available hand held scanners of this type.
They are more commonly used for objects rather than spaces.
As with laser scanners they are often available for just 3D geometry with poorer texture
quality.
In the authors opinion they are marketed as easy to use but it takes a skilled
operator to get good results. Most applications require significant post clean up.
- Return of flight, infra-red.
Classic example is the original Kinect, but there are lots of depth cameras now. These are normally
used for tracking applications but are often adapted to capture 3D models of objects and spaces.
They can potentially overcome the occlusion problem of laser scanners because they are generally
more portable can be moved around a space building up the 3D model incrementally.
They are more limited in their distance depth, compared to laser scanners.
In general their spatial resolution is low, at least compared to other technologies.
- Depth map.
This does not strictly result in a 3D model rather a depth surface in 3D. Generally uses a pair (or
more) cameras, also increasingly being referred to as volumetric capture. Relies on feature point
detection and so subject to some of the same limitations as 3D reconstruction.
Where this might be used is in creating a stereo panorama pair from photographs. In theory it can
give some "look-around" effects.
A special case of this type of acquisition are depth maps derived from
focus stacking.
- Photographic guided.
This is where photographs combined with human guided selection of architectural elements are
turned into a realistically textured model. Generally used for exterior buildings. In this example
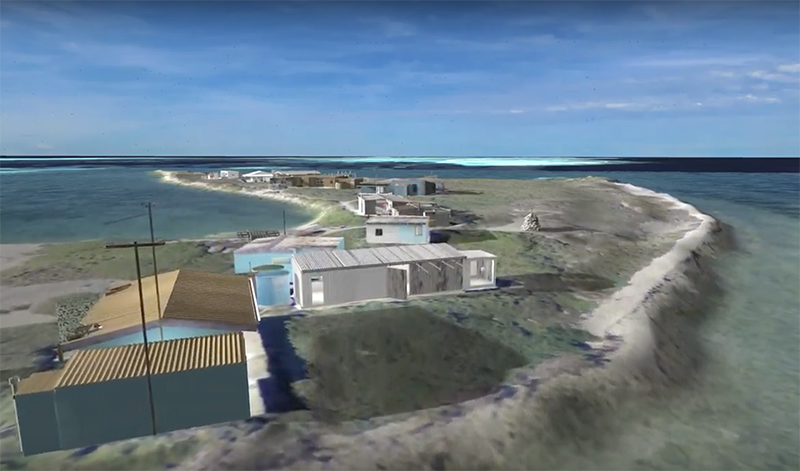
scrub through to the 3 minute mark, these building were created using this approach. Perhaps 20
photographs of each building, used PhotoModeller software to select geometric elements
(corners, walls etc) and the software then extracts textures for a more realistic model.
It can be a relatively fast process and creates clean efficient geometry.
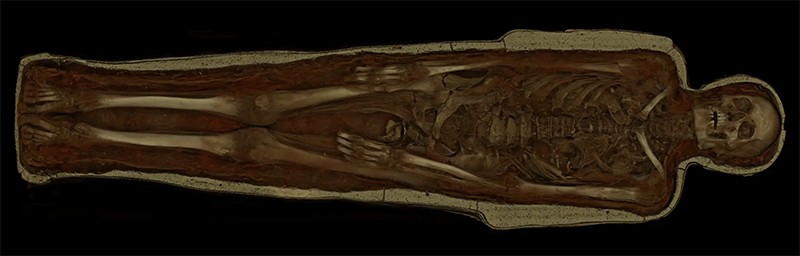
- Volumetric scanning.
These are typically MRI and CT, can only reasonably apply to objects, and of modest size (<2m).
Cannot generally be performed in the field. Provide interior information but no colour.
- Manual modelling.
There is of course manual reconstruction based upon a large collection of images, hopefully
orthophotographs suitable for texture maps, and a skilled 3D modelling operator.

Some considerations when choosing a technology for a particular task.
Degree of geometric and texture accuracy required in the 3D model. Laser scanning is the most
accurate for large scale, potentially down to mm (depends on the device).
Relative importance of colour/texture compared to geometry. Photographic processes generally
provide best texture representation.
Scale of the object.
Access. Most techniques will only capture what can be "seen", obviously. This is often related to
scale, if one cannot access positions from which to scan or photograph then those parts can't be
captured.
Surface materials. Commented on this already, particularly problematic are reflective glossy
surfaces. For example, laser scanning and 3D reconstruction will usually create 3D geometry that
is the mirror reflection. Also dark regions and light absorbing spaces can be a problem.
Lighting conditions. Photography based solutions tend to be more amenable to extreme lighting.
Active technologies (return f flight) and structured light tend to be more sensitive to external
lighting.
Degree of static nature of the scene. Except for depth maps they all take a finite time to complete
the scan so all require static scenes over the duration of the scan.
Object/scene geometric complexity. Foreground occulers are problematic for all technologies. For
laser scanning it dictates how many stations might be required. For 3D reconstruction it
determines how many photographs are required, and may pose algorithm limitations as well.
Automated - human assisted/guided - human cleaned/edited. Besides the time and cost of having
a human involved in post production and cleaning, it also raises questions of data integrity. Is the
operator biasing the model to their mental picture of what it should look like.
For objects, does it need to be performed on-site or in more controlled environment.
In summary, pretty clear that there is no one technology that can be applied to general 3D scanning.