Capture of Omni-Directional Stereoscopic Panoramic ImagesSiggraph Asia 2013, Hong KongPaul Bourke, Volker Kuchelmeister November 2013 Introduction
A number of stereoscopic cylindrical displays have been developed over the years, the most recent being the CAVE2. Some of these, unlike the traditional CAVE environments, provide a seamless 360 stereoscopic image without corners [AVIE] and thus can support a heightened sense of immersion. Most immersive displays that consist of discrete walls rely on head tracking and are thus only intended to be a single person experience. For cylindrical displays a method is well known by which stereoscopic panoramas can be presented without the need for head tracking, these stereoscopic pairs are generally referred to as omni-directional [Ishiguro et al, 1992][Bourke 2006]. This allows large cylindrical displays to be constructed that support multiple person audiences with each person potentially looking in a different direction.
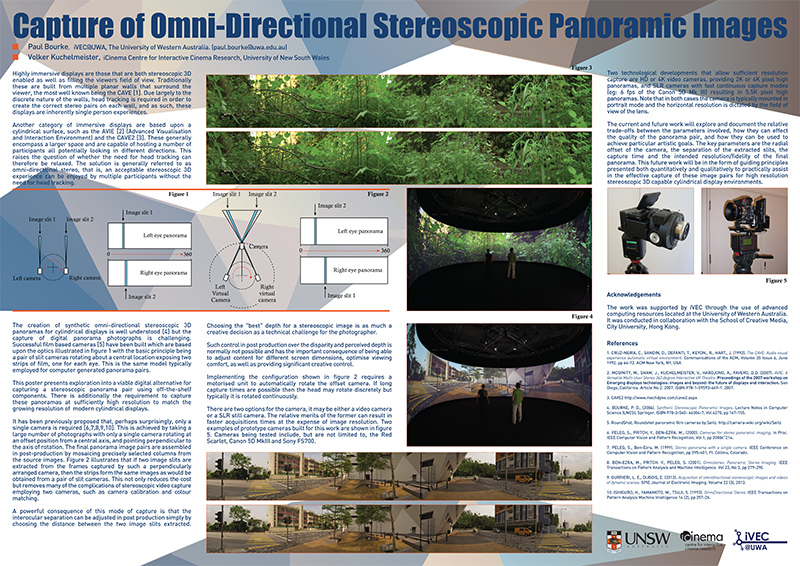
A digital alternative for the film based rotating slit camera has been developed, figure 1 (right). It is based upon a motorized rotating head and employs either a digital video camera (Red Scarlet) or a SLR camera (Canon 5D MKIII). Only a single camera is required, two vertical stripes are extracted from each frame, these are each arranged consecutively to form the stereoscopic panoramic pairs. This technique has a significant
advantage in that the inter-ocular separation can be adjusted in post-production.
Historically one of the issues of using a video camera had been the limited vertical resolution. While this improved with HD video where one can acquire a vertical resolution of 1920 pixels (mounted sideways), the recent releases of 4K video cameras such as the RED enables one to capture stereoscopic panoramic pairs that match the resolution of many cylindrical displays.
The work was supported by iVEC through the use of advanced computing resources located at the University of Western Australia. It was conducted in collaboration with the School of Creative Media, City University, Hong Kong. ReferencesMCGINITY, M., SHAW, J., KUCHELMEISTER, V., HARDJONO, A., FAVERO, D.D. AVIE: A Versatile Multi- User Stereo 360 degree Interactive VR Theatre. Proceedings of the 2007 workshop on Emerging displays technologies: images and beyond: the future of displays and interaction. San Diego, California. Article No. 2. 2007. ISBN:978-1-59593- 669-1., 2007. BEN-EZRA, M., PRITCH. Y., PELEG, S. 2001. Omnistereo: Panoramic StereoImaging. IEEE Transactions on Pattern Analysis and Machine Intelligence. Vol. 23, No. 3, pp. 279- 290, March. BOURKE, P.D. 2006. Synthetic Stereoscopic Panoramic Images. Lecture Notes in Computer Science (LNCS), Springer, ISBN 978-3-540-46304-7, Volume 4270, pp 147-155 ISHIGURO, H., YAMAMOTO, M., TSUJI, S. 1992. OmniDirectional Stereo. IEEE Transactions on Pattern Analysis Machine Intelligence 14 (2), pp 257- 26. PELEG, S., Ben-Ezra, M. 1999. Stereo panorama with a single camera. IEEE Conference on Computer Vision and Pattern Recognition, pp 395-401, Ft. Collins, Colorado, June. Paper overview: posteronepage.pdf Poster: PDF
|