Mars - High Resolution Renderings
Written and rendered by Paul Bourke |
|
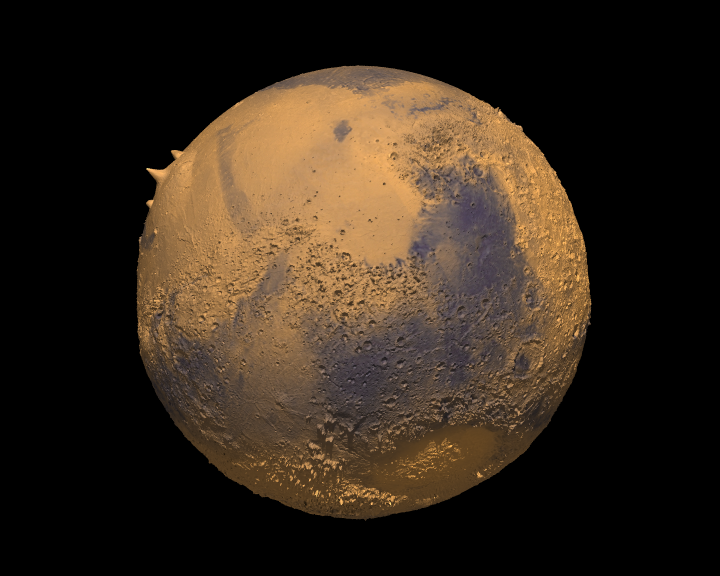
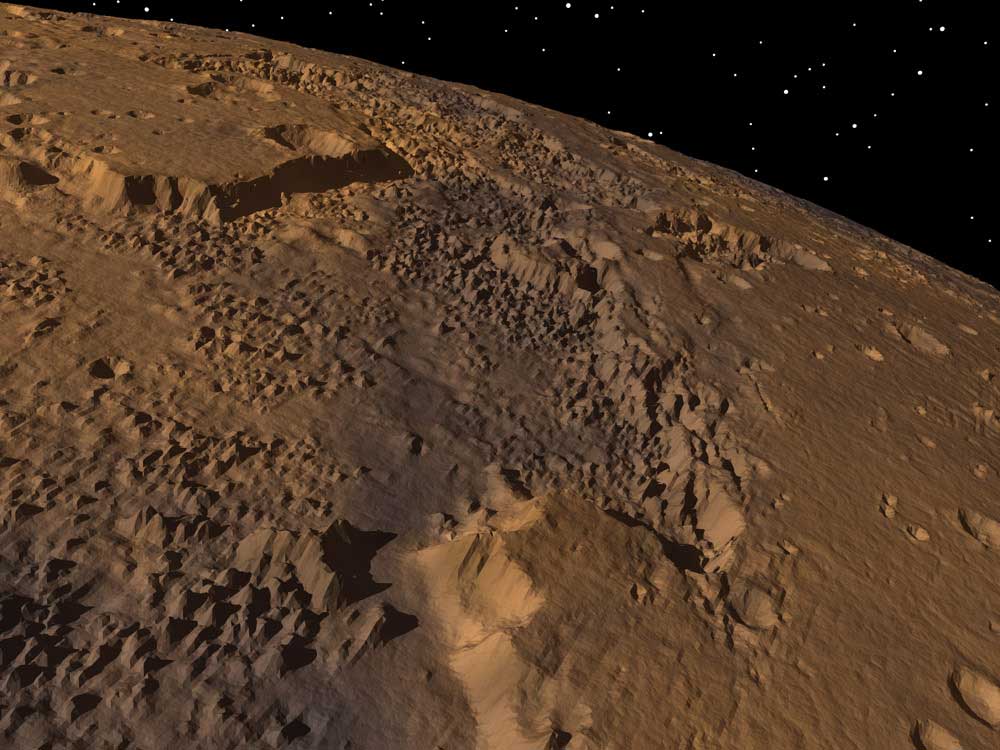
The following are a semi random selection of images (my favourites) that arose from renderings of the topology of Mars using the recently released (at the time) 1/32 degree datasets from MOLA (Mars Orbital Laser Altimeter). This amounts to a resolution of about 1.8km at the equator and progressively better resolution towards the two poles. There are no special effects employed, these are raytraced images of the raw topology data with a single surface colour texture map. There is a height exaggeration of typically 25 for the distant whole planet examples and a factor of 5 for the examples taken closer to the surface. Click on the images to get a higher resolution PNG version. |
|
|
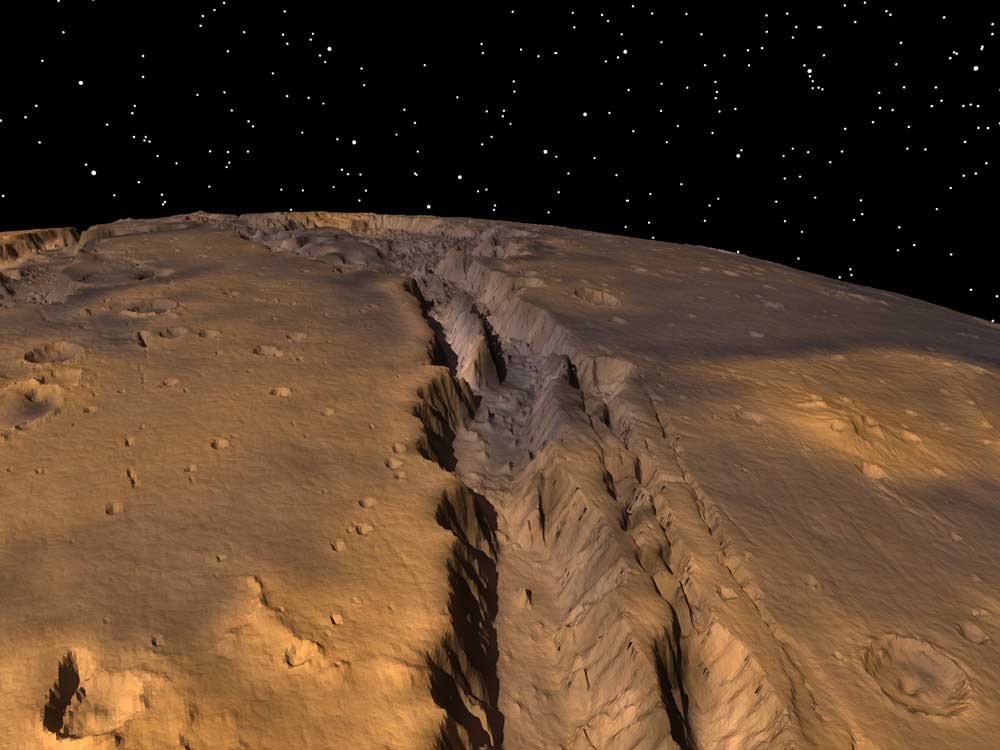
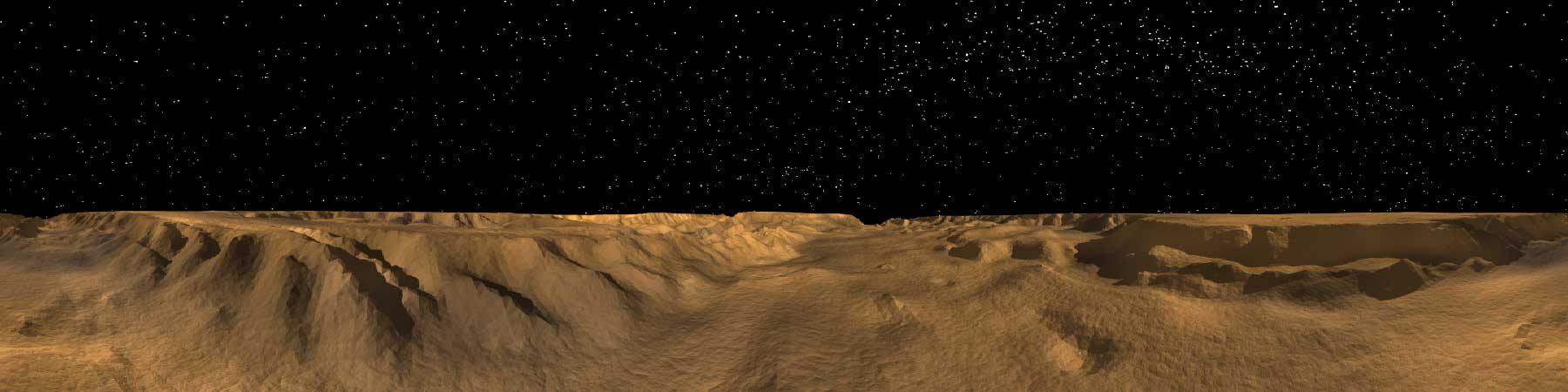
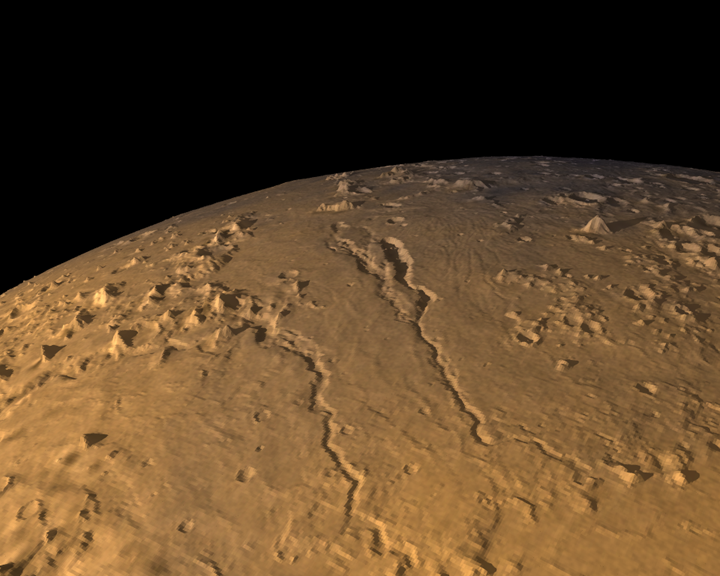
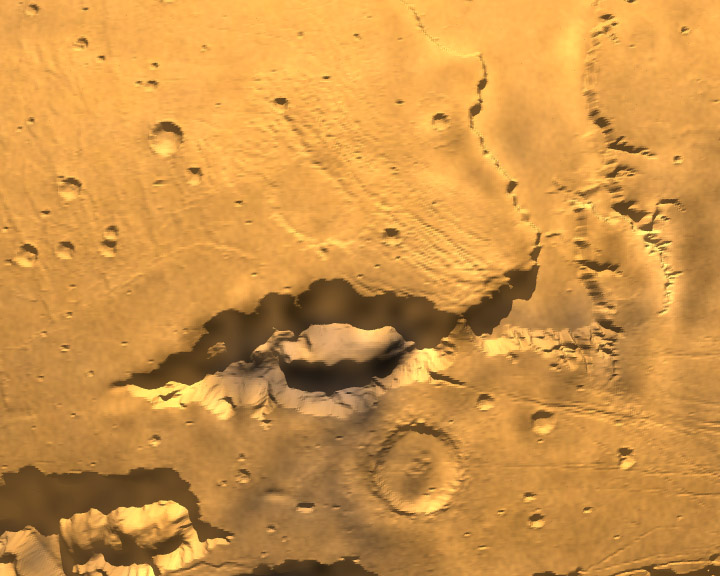
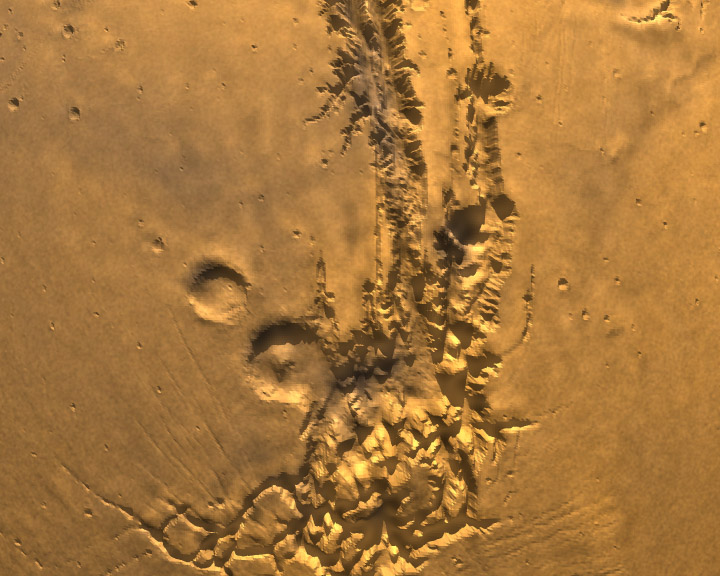
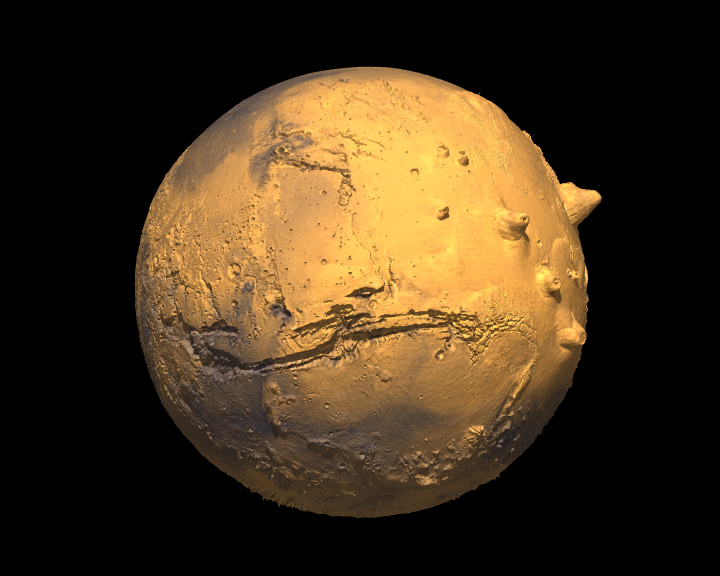
The Grand Canyon only grander! The Mariner Valley (Valles
Marineris), a great rift valley extending almost 5000km and at places
100km wide. Compare this to the Grand Canyon on Earth which is only 800km
long and at most 1.5km deep.
|
The Mariner Valley is the main feature
of a system of canyons cutting across the Martian equator.
|
|
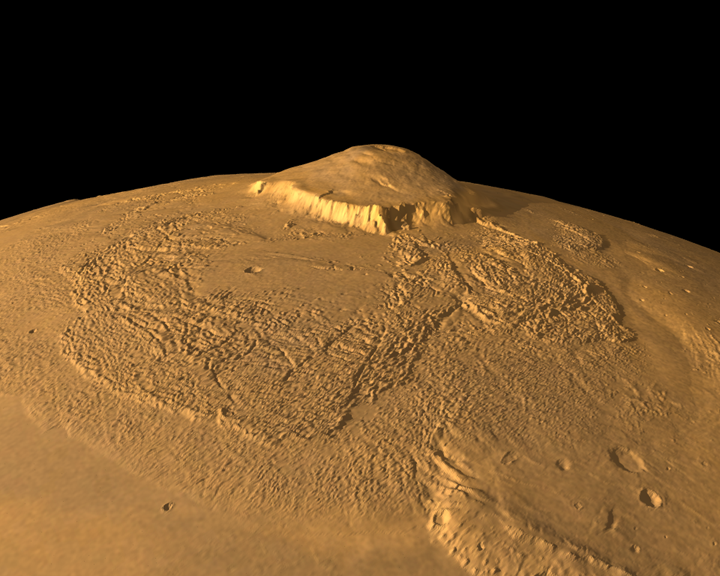
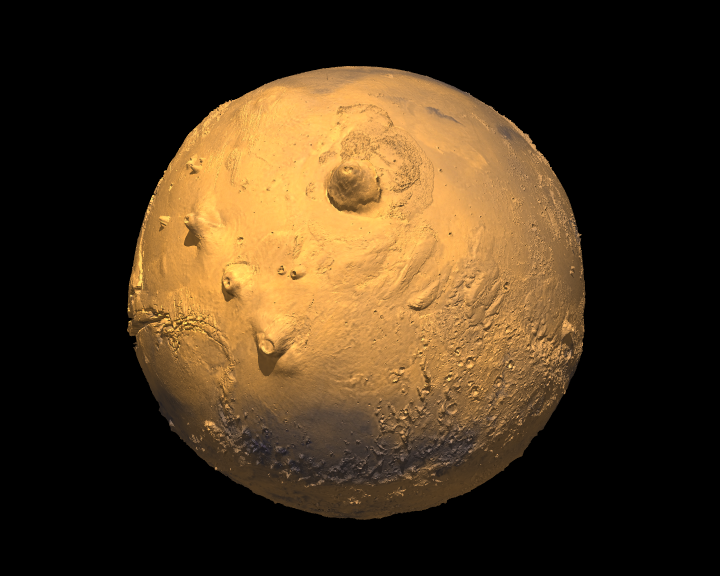
The highest point on the surface is Olympus Mons which stands about
24km high, compared to about 5km for Mount Everest on Earth. It
is only about 500km diameter at the base and rises up from a smooth
plane.
|
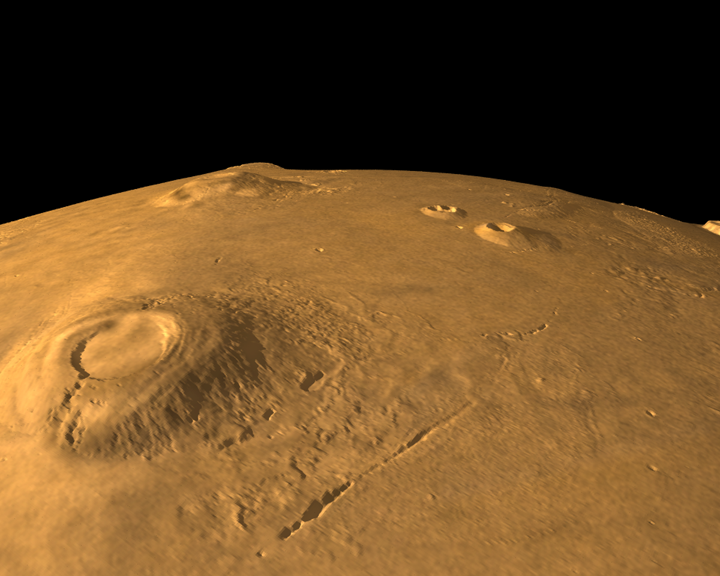
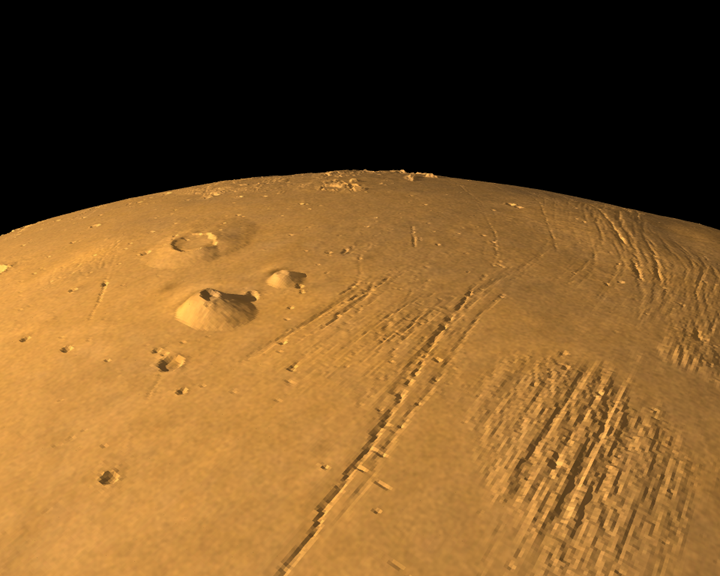
The volcanoes are called shield volcanoes but unlike on
Earth where plate motion
tends to form strings of volcanoes, on Mars there is no plate motion
and the volcanoes tend to rise up in a single location.
|
|
|
|
|
|
|
|
|
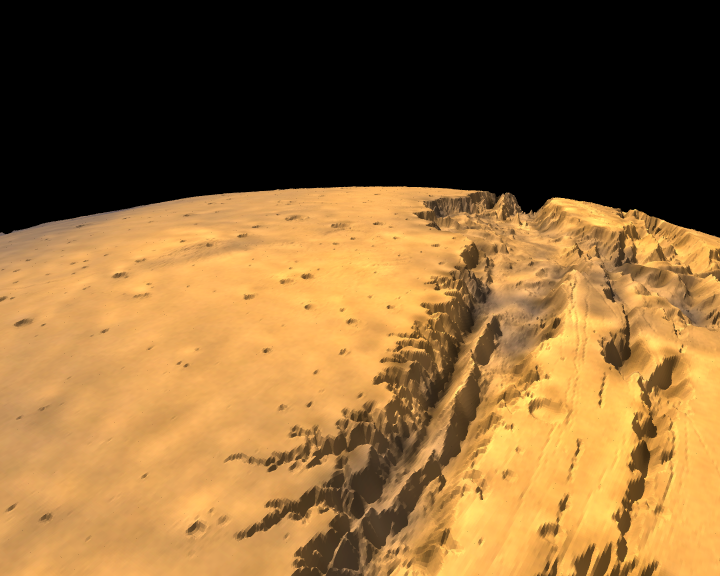
A 1 minute fly-over of Mariner Valley was shown on the Australia catalyst
TV program on the 17th August 2001.
|
|
|
|
|
|
|
|
On November 7 1996 NASA launched a satellite from Cape Canaveral whose
mission was to survey and photograph Mars. One aspect of the mission
was to acquire a high resolution topology map of the whole planet,
this instrument was called MOLA (Mars Orbital Laser Altimeter).
|
The satellite reached Mars in September 1997 and started mapping the
topology in March 1999 during which time it orbited the planet about
120 times at a altitude of around 400km.
|
|
 |
 |
The goal of this project at the Centre for Astrophysics and Supercomputing was to accurately render the surface of the planet from any vantage point. The accuracy includes correct sun positions and shadows, correct rotation and position of the two moons (Deimos and Phobos), and true star positions. A real colour map of the surface is used although it is from one time snapshot since the colour changes most notably with dust storms. The amount of raw polygonal information (130 million triangular polygons) precluded the use of commercial rendering packages and while there are some specialist methods for rendering such datasets they don't provide the desired rendering quality (eg: shadows). The rendering was performed using a combination of locally developed tools, a modified version of a public domain raytracer (PovRay) and locally developed distributed rendering utilities. The stills and animations were rendered using up to 60 processors on two separate farms. One farm is based upon P3 processors and another consisting of Dec Alpha processors. The final animations formed a total of almost 8 minutes rendered in stereo3D (IMAX 3D style) for a total of 24000 frames.