Visualising Mandelbrot Escape TrajectoriesWritten by Paul BourkeAugust 2021
In the following trajectories of points within the Mandelbrot set, those that do not escape, are visualised as smoothed curves. The trajectories are of course discrete points and thus form jagged paths, a more pleasing result is created here by forming smooth curves. Grids
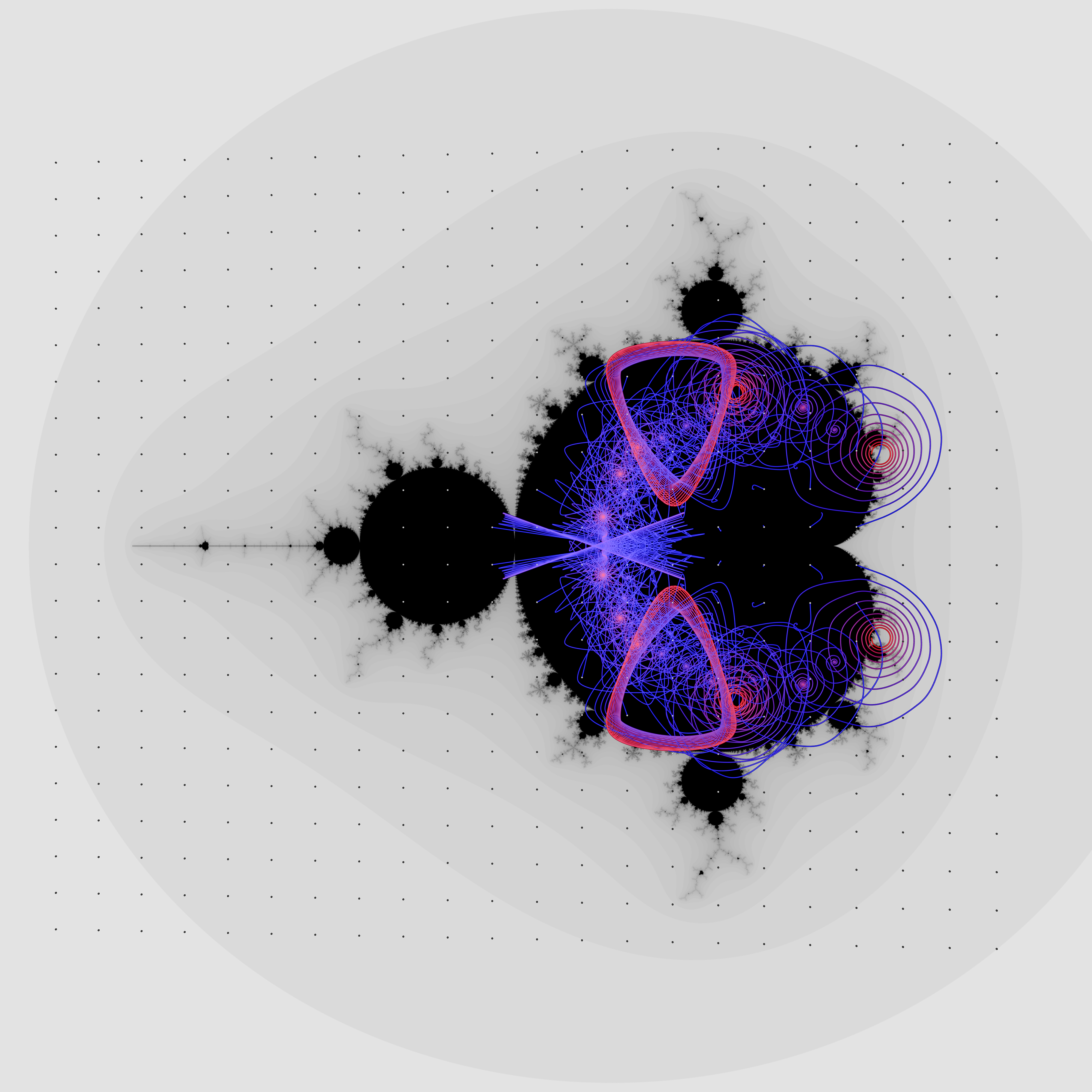 Grid: 21, Filter set to 0.75
The plane is sampled on a regular grid, the points are shown as the small black and white dots. Black dots denote samples that go to infinity (not in the set), white dots are points within the set. While the escape trajectories can be drawn also, they are less interesting, shooting off to infinity generally (but not always) quite quickly.  Grid: 21, Filter set to 0.75
Since samples to the left of the set tend to zig-zag back and forward across the imaginary axis. To avoid these less attractive trajectories a filter was added to remove trajectories with large segment sizes. 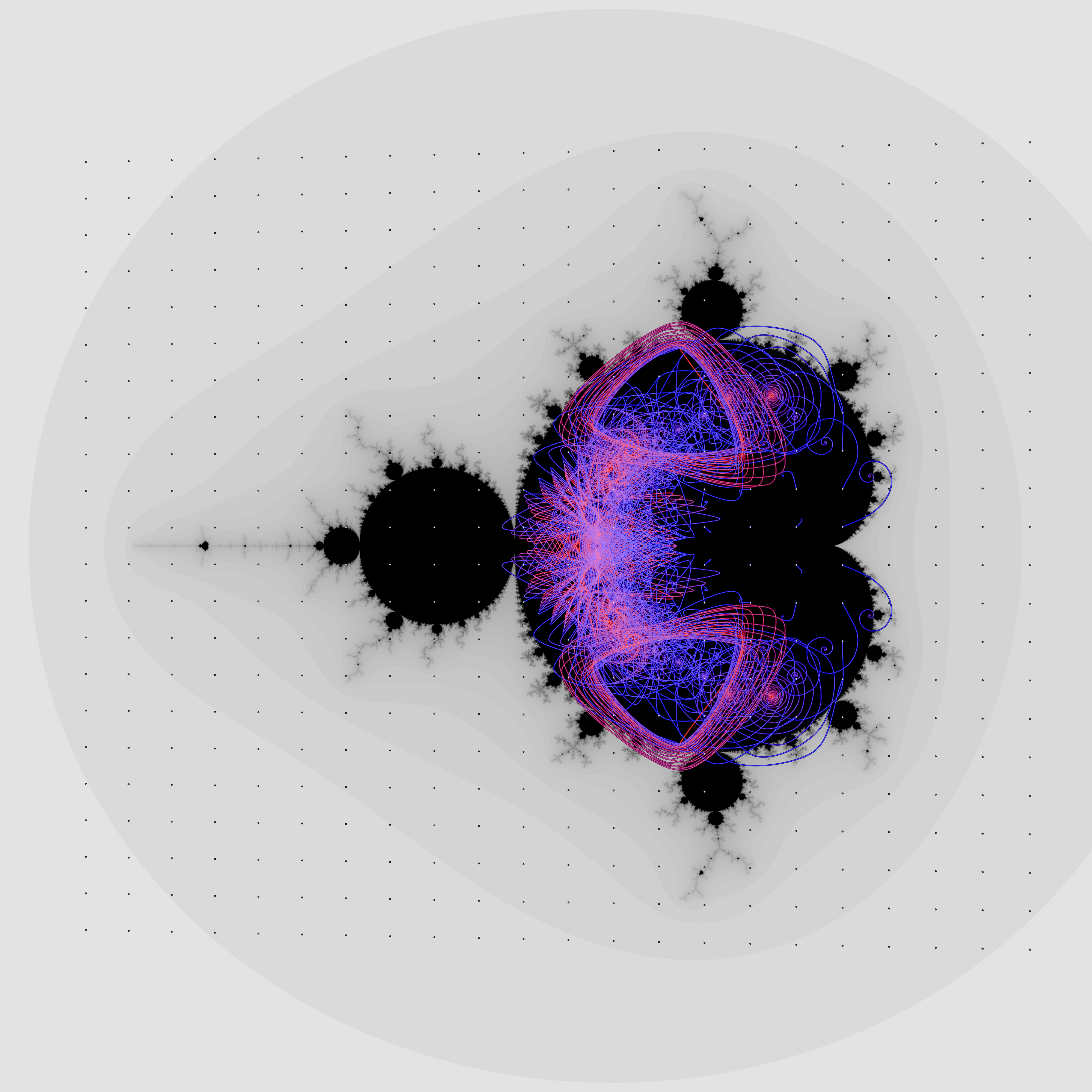 Grid: 21, Filter set to 0.75
The grid density can be varied to give denser or finder samplings. At the limit the result is the Buddhabrot image. 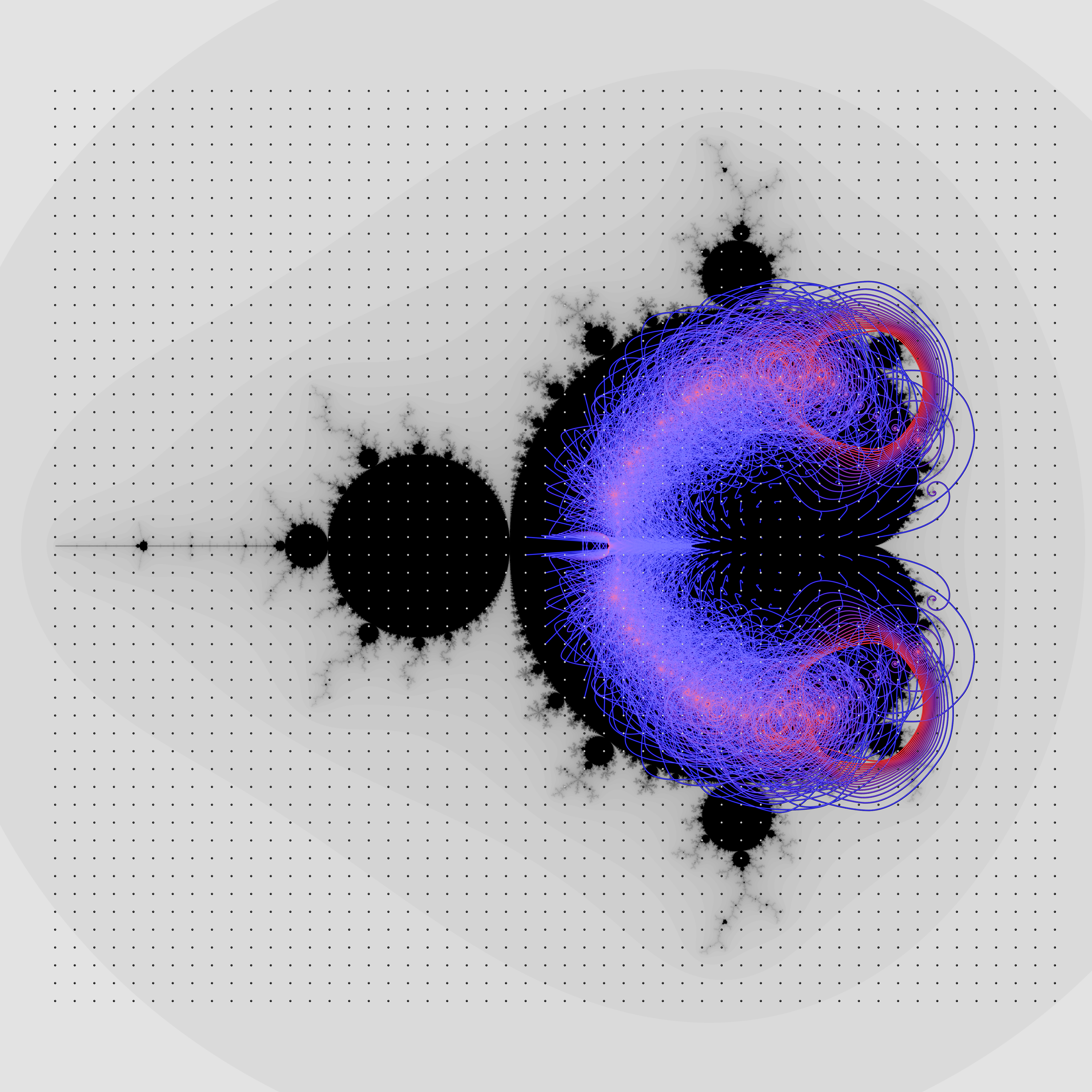 Grid: 51, Filter set to 0.5 Lines
 100 samples, No filter
In order to create less cluttered images, instead of sampling on a grid one can also sample along just a line segment. While only lines of constant real values are shown below, arbitrary lines are supported. 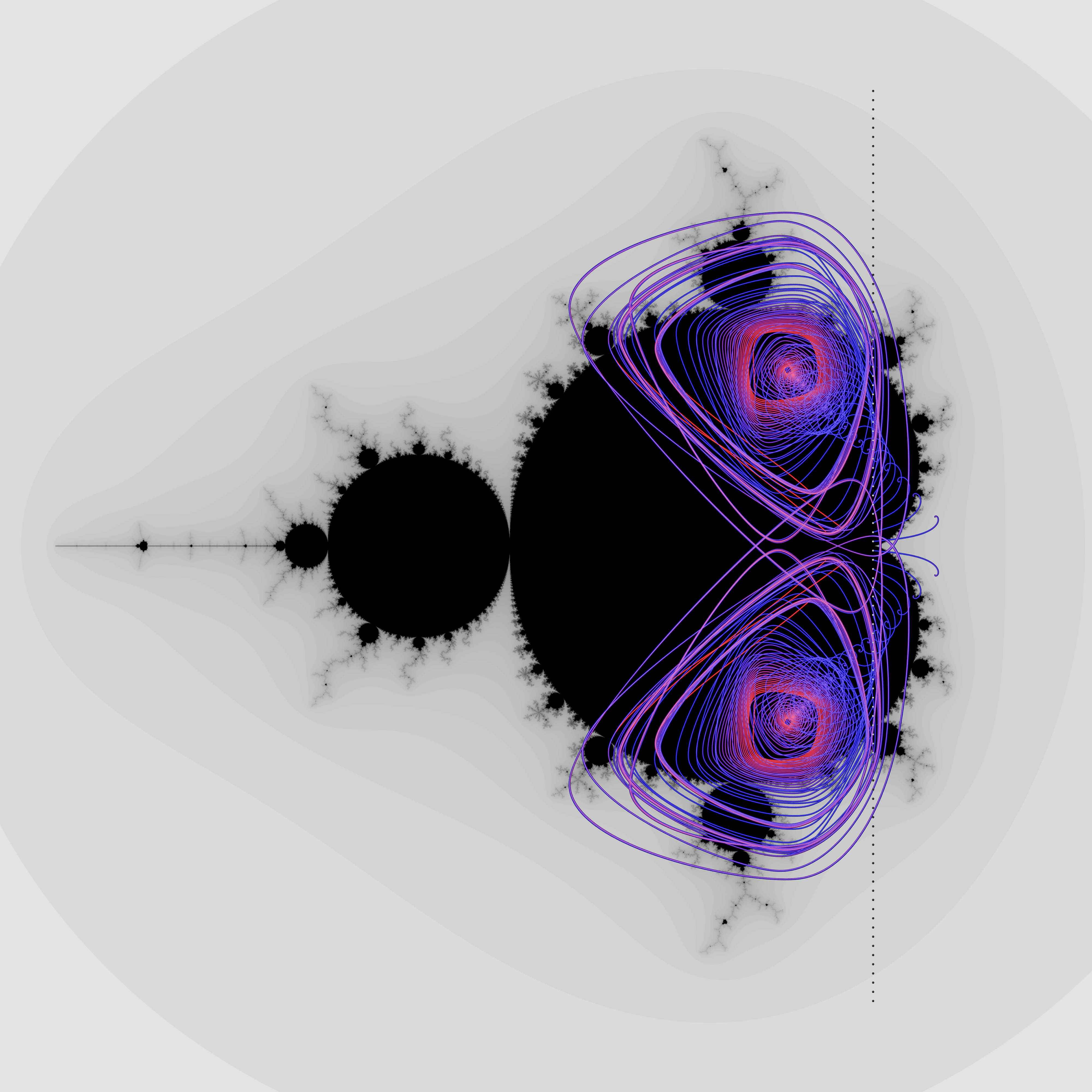 100 samples, No filter
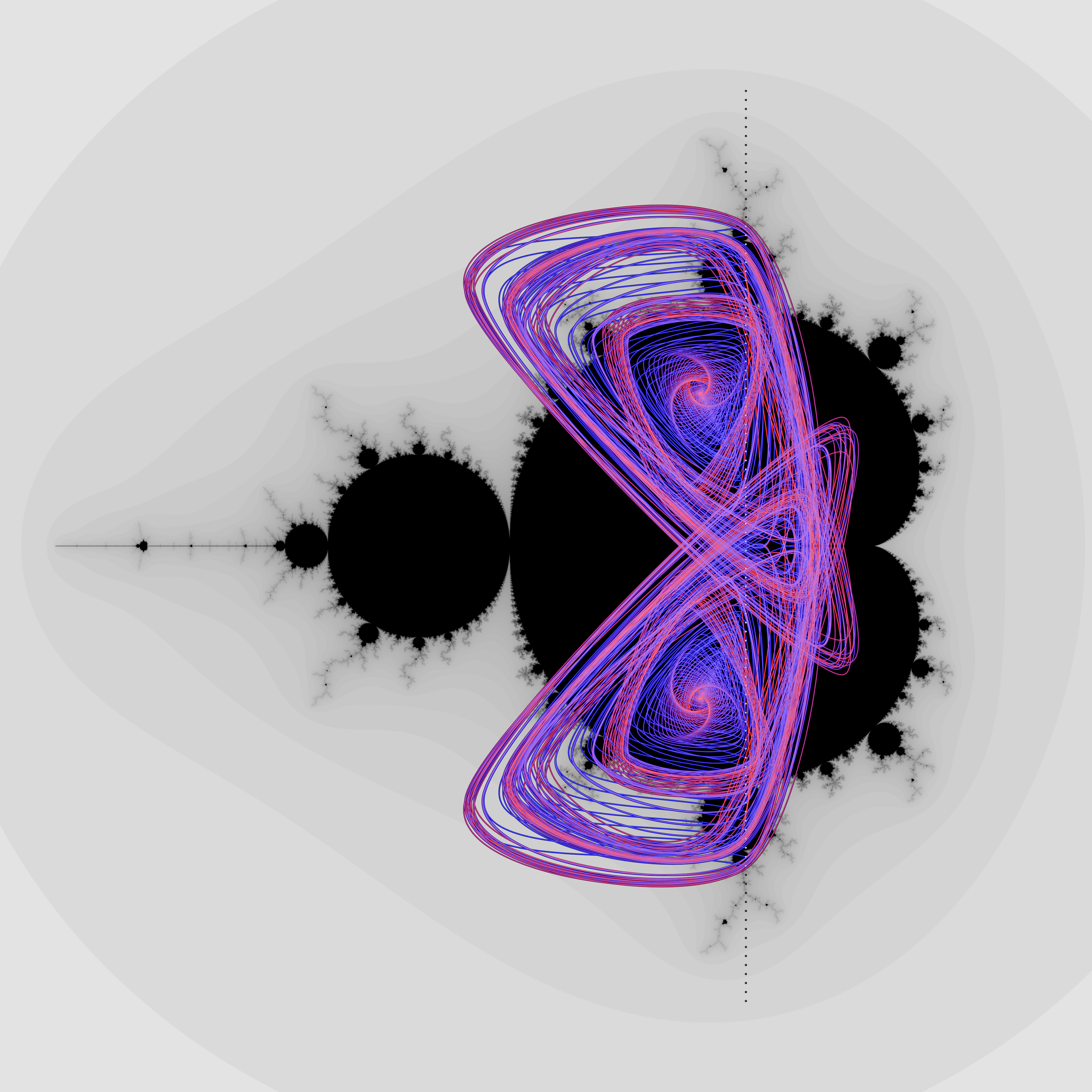 100 samples, No filter. The movie Asymmetric grids
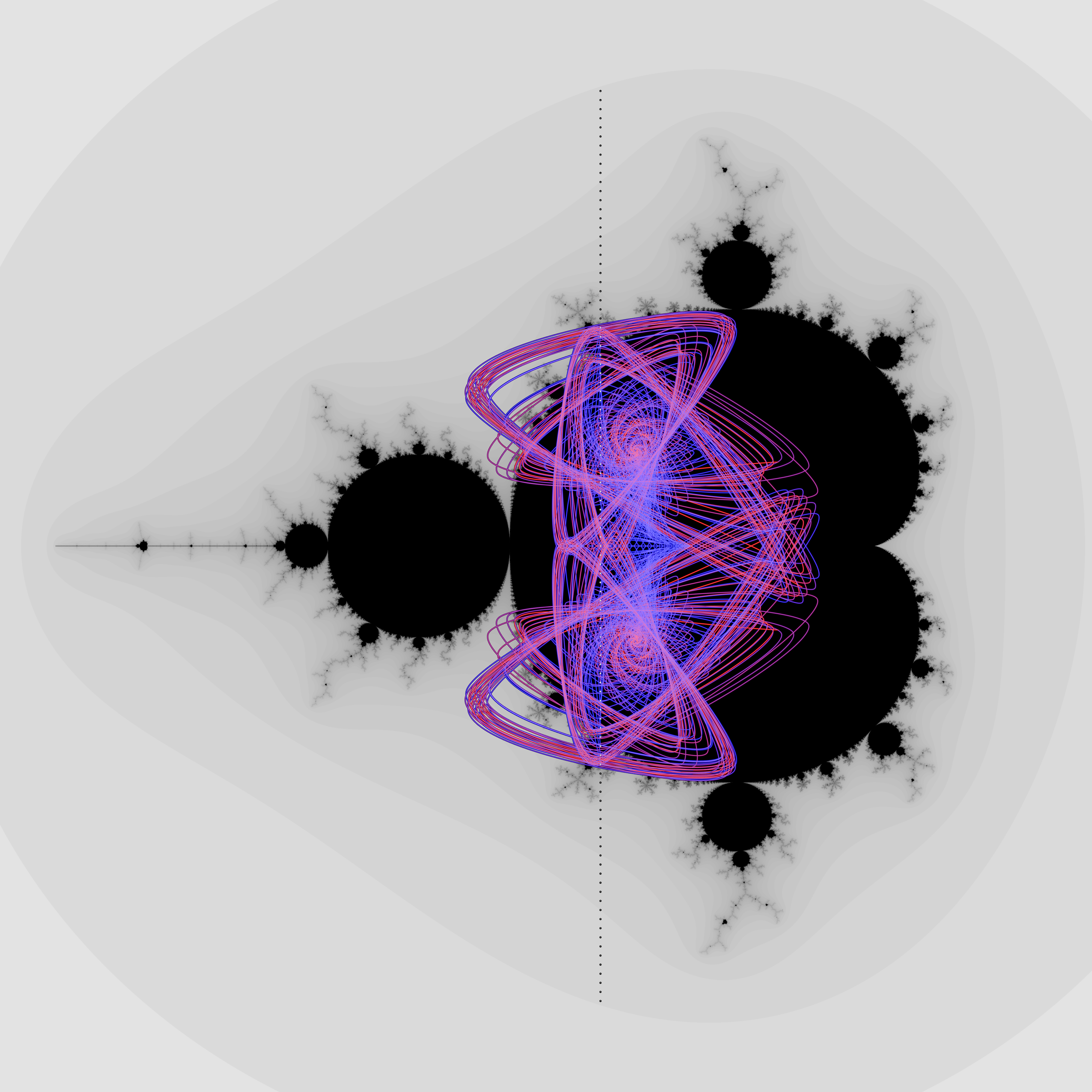
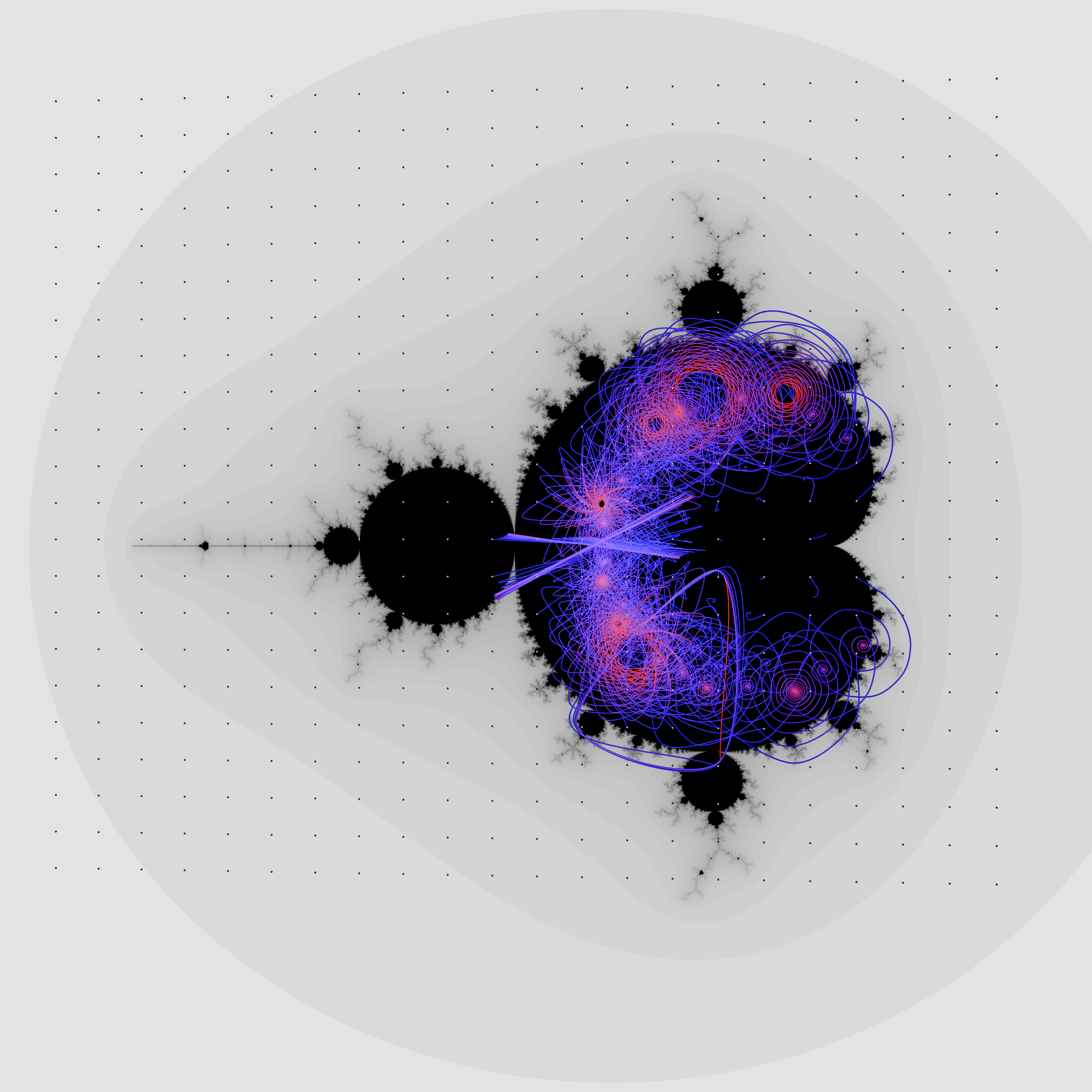 Grid: 21, Filter set to 0.75
Since the set is mirror symmetric about the real axis, the trajectories will also be symmetric if the sampling grid is symmetric about the real axis. The following are examples where the sampling grid is not centered about the real axis leading to a different sampling on the positive imaginary axis to the negative imaginary axis. This is implemented by being able to specify a real and imaginary offset to the sampling grid.  Grid: 21, Filter set to 0.75
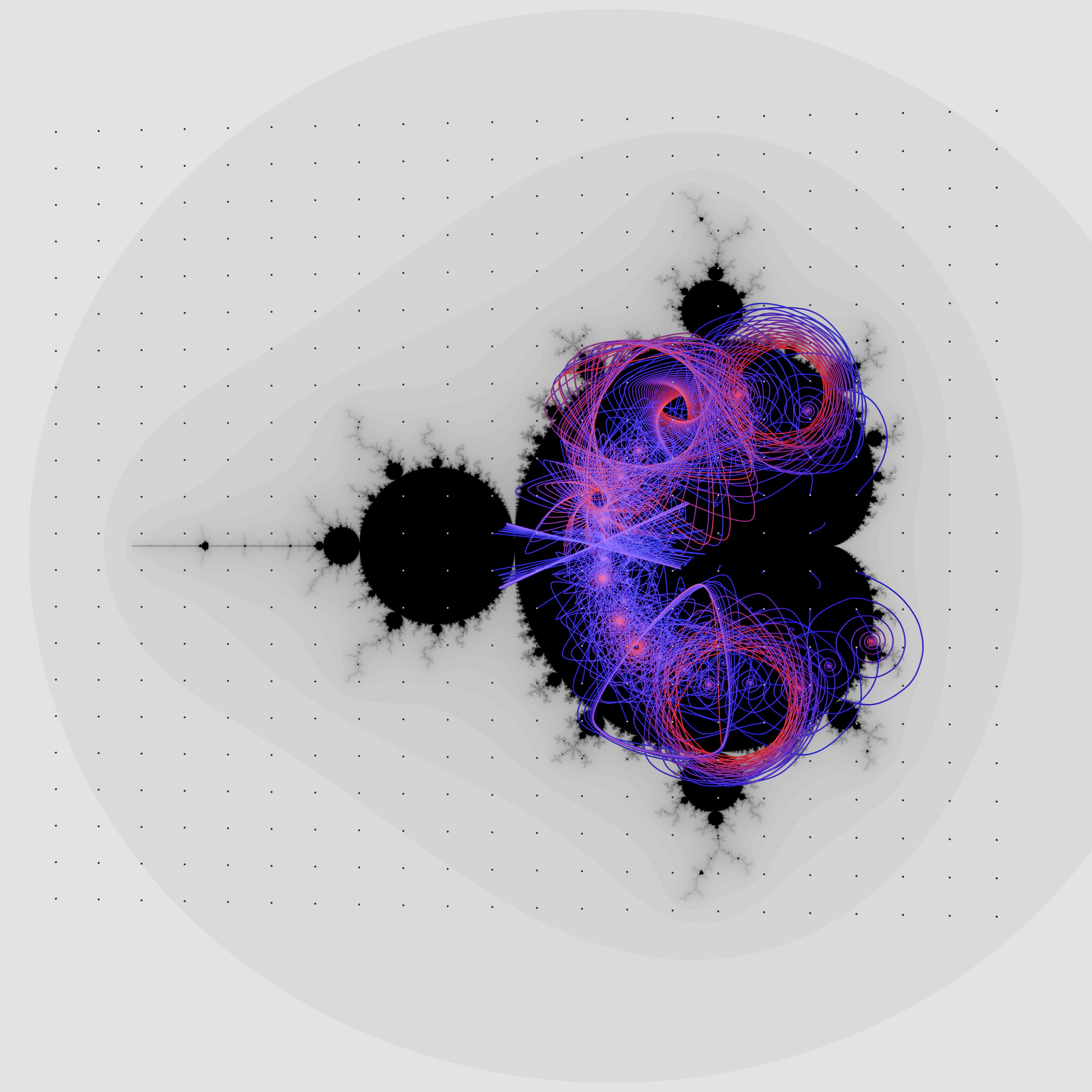 Grid: 21, Filter set to 0.75
Usage: mandelescape [options] Options -h This help -n n Set grid density, default: 21 -x n Set grid offset in real axis, default: 0 -y n Set grid offset in imaginary axis, default: 0 -f n Filter length when discarding trajectories with large displacements, default: 100 -dz n Set height scale factor, default: 0 -linex n Create vertical line sampling at real value x -liney n Create horizontal line sampling at imaginary value y
|